Turbolàser imperial Star Wars
Completion requirements
 |
|
Desenvolupament
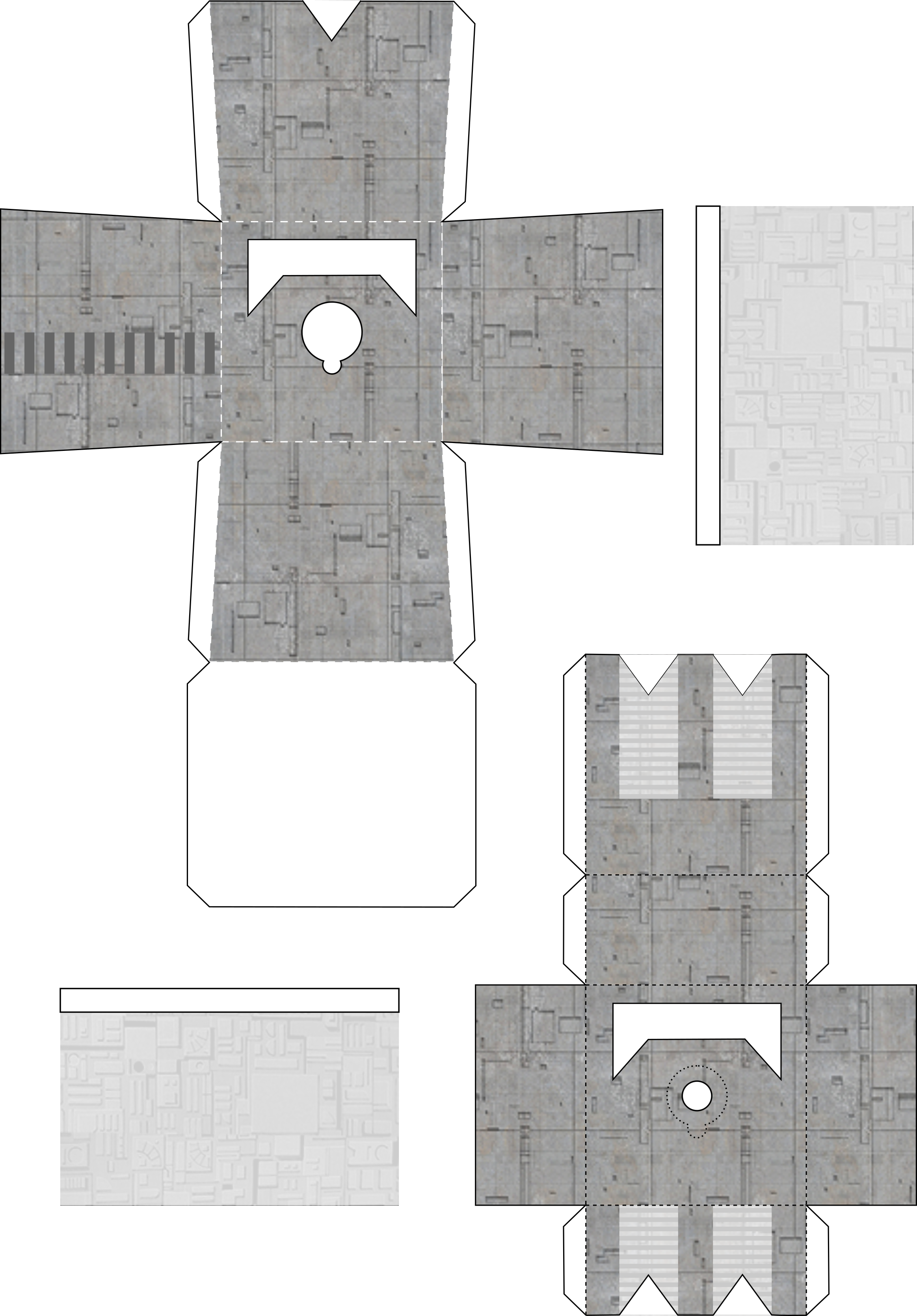
Estructura:
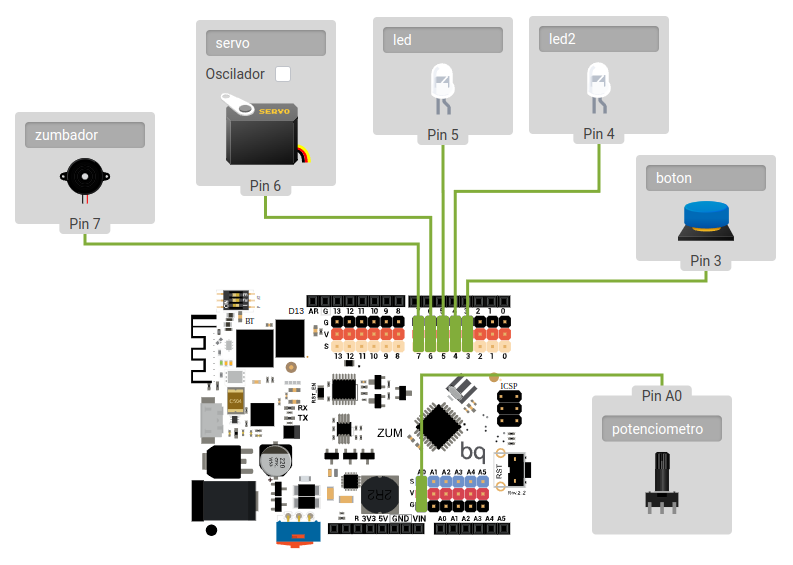
Connexions:
- Connectem el potenciòmetre al pin A0
- Connectem el pulsador al pin 3
- Connectem Leds als pins 4 i 5
- Connectem el miniservo al pin 6
- Buzzer al pin 7 (cal connectar amb cables individuals
Programació
Ens dirigim a la ide de mblock https://ide.mblock.cc i fem el següent programa:
- Escollim la targeta Arduino Uno
- Fem el programa
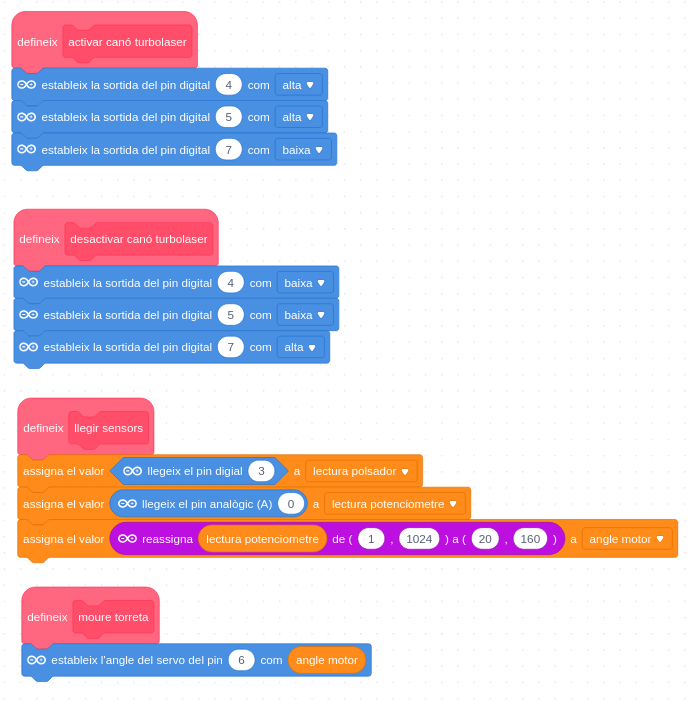
- Creem els blocs de codi:
- activar canó turbolaser
- desactivar canó turbolaser
- llegir sensors
- moure torreta
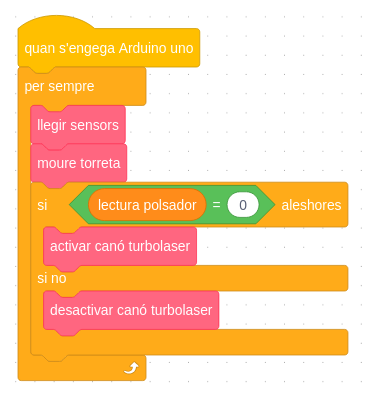
- Afegim: Esdeveniments > Quan s'engegui l'Arduino
- Afegim: Control > per sempre
- Executem "llegim els sensors"
- Executem "movem la torreta"
- Si està apretat el polsador "activar canó turbolaser" sino "desactivar canó turbolaser"
El codi en ArdunioC
// generated by mBlock5 for <your product>
// codes make you happy
#include <Arduino.h>
#include <Wire.h>
#include <SoftwareSerial.h>
#include <Servo.h>
float lectura_polsador = 0;
float lectura_potenciometre = 0;
float angle_motor = 0;
void activar_can_C3_B3_turbolaser(){
digitalWrite(4,1);
digitalWrite(5,1);
digitalWrite(7,0);
}
void desactivar_can_C3_B3_turbolaser(){
digitalWrite(4,0);
digitalWrite(5,0);
digitalWrite(7,1);
}
void llegir_sensors(){
lectura_polsador = digitalRead(3);
lectura_potenciometre = analogRead(A0+0);
angle_motor = map(lectura_potenciometre, 1, 1024, 20, 160);
}
Servo servo_6;
void moure_torreta(){
servo_6.write(angle_motor);
}
void _delay(float seconds) {
long endTime = millis() + seconds * 1000;
while(millis() < endTime) _loop();
}
void setup() {
pinMode(4,OUTPUT);
pinMode(5,OUTPUT);
pinMode(7,OUTPUT);
pinMode(3,INPUT);
pinMode(A0+0,INPUT);
servo_6.attach(6);
while(1) {
llegir_sensors();
moure_torreta();
if(lectura_polsador == 0.000000){
activar_can_C3_B3_turbolaser();
}else{
desactivar_can_C3_B3_turbolaser();
}
_loop();
}
}
void _loop() {
}
void loop() {
_loop();
}
Carreguem el programa a la placa
- Copiem el codi de "vista prèvia: Arduinoc".
- Obrim la IDE d'Arduino.
- Esborrem el que hi hagi i enganxem el nostre codi
- Connectem la placa per USB (parem l'alimentació de la pila)
- Assegurem que estigui escolli el port i la placa al menú d'Eines
- Verifiquem el codi
- Pugem el codi
Enllaços d'interès
- Enllaç projecte Mblock https://planet.mblock.cc/project/1543199
- Video Youtube película Star Wars https://www.youtube.com/watch?v=AA_D__HMuFw
- Tie Figher cube paper https://www.deviantart.com/cyberdrone/art/Cubee-TIE-Fighter-White-122780640
- Tie Figher cube paper simplificat https://moodle.communia.org/pluginfile.php/1558/mod_page/content/57/cubee___tie_fighter_by_cyberdrone_simple.pdf
- Torreta turbolaser retallable en pdf https://moodle.communia.org/pluginfile.php/1558/mod_page/content/57/Retallable%20torreta%20turbolaser%20star%20wars.pdf?time=1649094483044
Last modified: Sunday, 5 May 2024, 11:42 PM